Today hydrographical and geophysical survey operation show an increasing demand for intensive probing of the water column and seabed with various sensors. Though manual operation is in most cases possible, it becomes less feasible. The rapid survey demand, cost for sea time and human factors generally favors an automated approach for most common sensors. Following this demand the design of the Intelliwinch not only focuses on the automated measuring cycle, but also on the integration of different sensors. Additionally the highly flexible system allows normal communication and operation with third party sensor and RheoTune software. Build in time series makes the device also very suitable for scheduled measurements from unmanned platforms.
KEY Features
– Time series with single probe sensors
– Automated correction for sensor height/ inclination /depth/multibeam depth
– Both for vertical deployment and towed devices
– Variable speed up to 90 m/min
– Safety settings for SOG, Slack wire, end-stop, water-depth, sensor tilt, depth
– Manual override for safety and quick profiling
– Frequency controlled engine enables smooth sensor movement
Typical applications
– Sound velocity profiling (continuous)
– Environmental sensors (OBS, CTD)
– Time series of scheduled measurements
– Side-scan sonar/magnetometer at constant depth above seafloor.
– Rheotune: vertical density/rheometry profiling
System description
The winch is operated by a dedicated software package: the Intelliwinch software. This software enables the selection of the sensor type and type of measurement (single deployment, fully automated time series, or constant height management for towed devices). The Intelliwinch control menu can be used to operate the winch. The main buttons are Up, down and stop. Also there is an option to enter the automated mode (for time series or tow-fish control). In this mode the software will control the winch depending on the sensor output. In the winch data display all relevant winch data can be observed, such as cable out, end stop, slack cable, and also all available probe data the system can use to control the winch. The single probe control settings and tow fish control settings enable user to make all settings for automated operation.



The magnetometer model G-882 cesium-vapor marine magnetometer provides the same high performance as our airborne instruments delivering high resolution results […]
Read more...
Stema RheoTune for setting of the nautical depth doing so by measuring the yield stress, viscosity and density of the fluid mud. This enables portmanagers to save costs on dredging.
Read more...
Bijzondere lier combineert compacte afmetingen met groot vermogen en hoge trekkracht Compacte 10,7 kW sterke lier met maximumsnelheid van […]
Read more...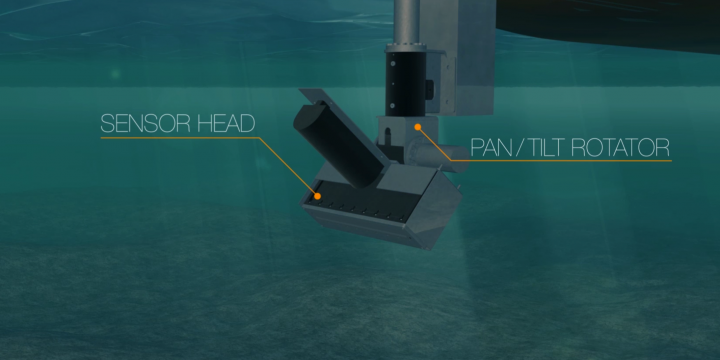
Press release: ECE Offshore and Stema Systems intensify their collaboration Two ambitious and innovative companies have this November sealed […]
Read more...


